Model-free diffusion planners have shown great promise for robot motion planning,
but practical robotic systems often require combining them with model-based
optimization modules to enforce constraints, such as safety. Naively integrating
these modules presents compatibility challenges when diffusion's multi-modal outputs
behave adversarially to optimization-based modules. To address this, we introduce
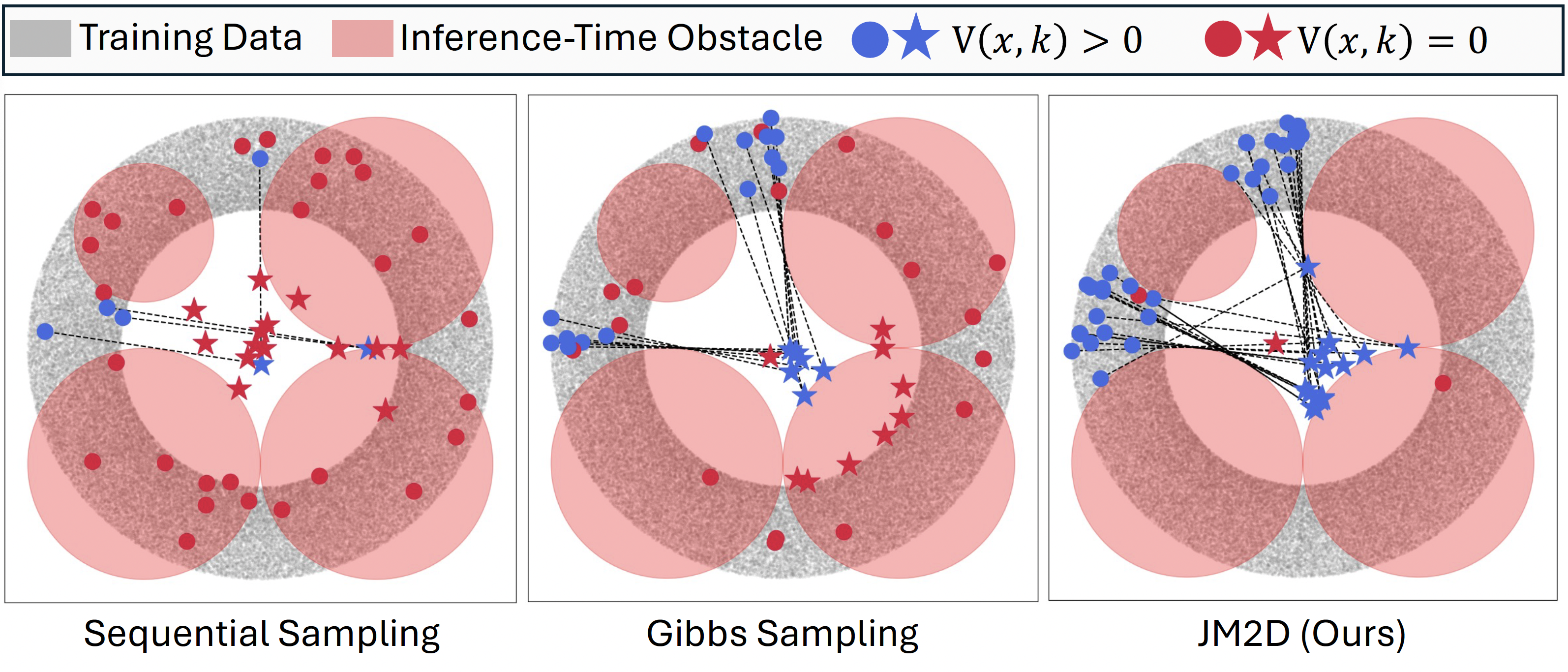
Joint Model-based Model-free Diffusion (JM2D), a novel generative modeling framework.
JM2D formulates module integration as a joint sampling problem to maximize compatibility
via an interaction potential, without additional training. Using importance sampling,
JM2D guides modules outputs based only on evaluations of the interaction potential,
thus handling non-differentiable objectives commonly arising from non-convex optimization
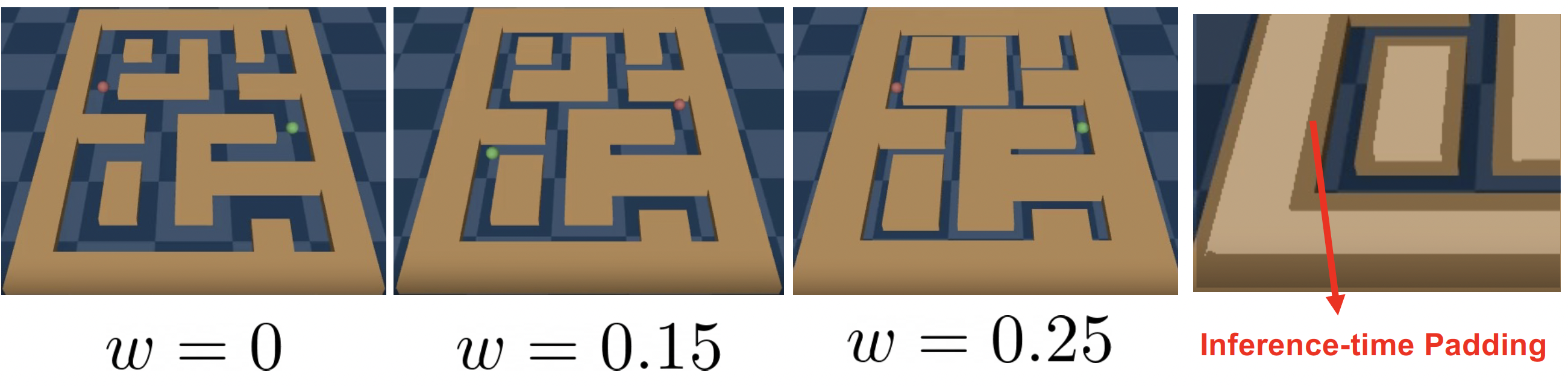
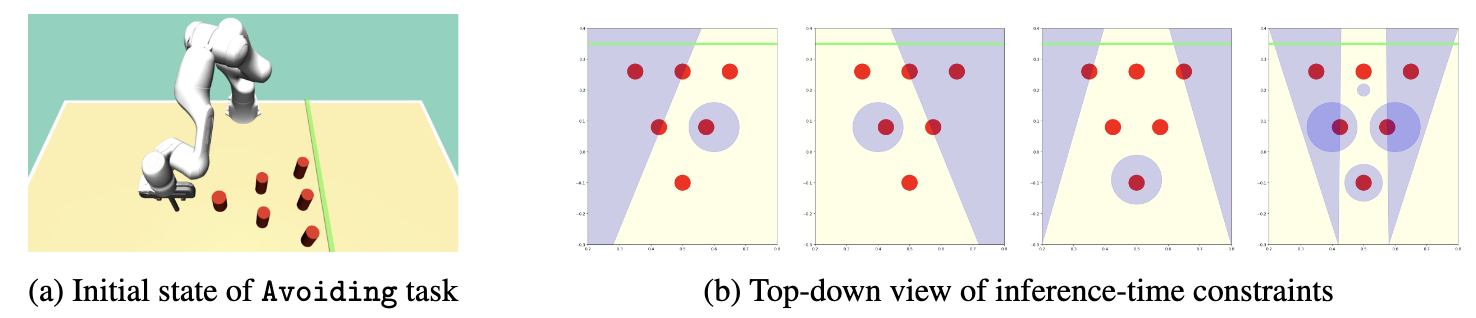
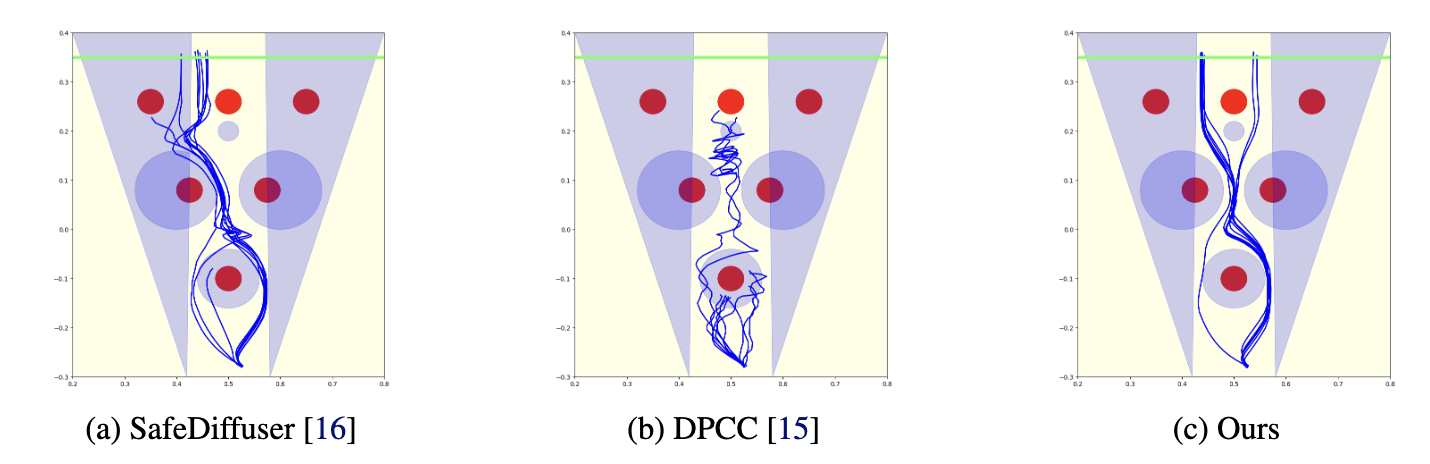
modules. We evaluate JM2D via application to aligning diffusion planners with safety
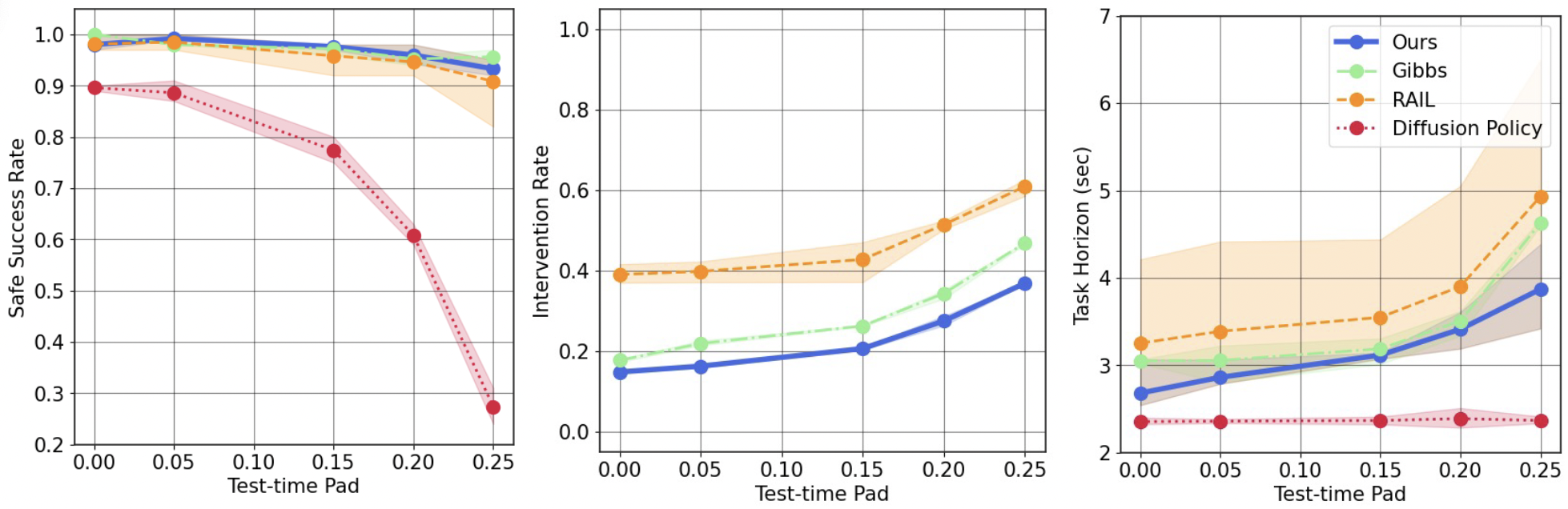
modules on offline RL and robot manipulation. JM2D significantly improves task performance
compared to conventional safety filters without sacrificing safety. Further, we show that
conditional generation is a special case of JM2D and elucidate key design choices by
comparing with SOTA gradient-based and projection-based diffusion planners.